近日,第七届中国高校智能机器人创意大赛的总决赛在浙江省余姚市隆重举办。参赛队伍来自来自清华大学、上海交通大学、浙江大学、哈尔滨工业大学、西安交通大学等全国27个省(自治区、直辖市)的382所高校,共计1366支队伍,参与人数达到4192人。在此次大赛中,信息工程学院由柳学斌、赵欣老师组建的2支参赛队表现出色,荣获专项赛二等奖1项、三等奖1项,全国三等奖1项。



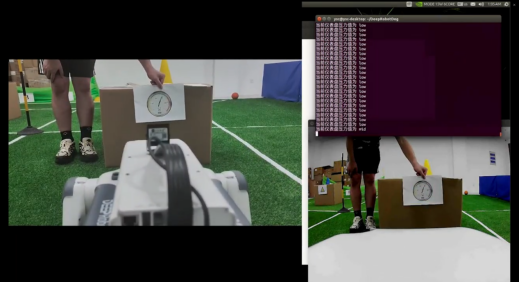
中国高校智能机器人创意大赛是国内技术挑战性极强、影响力广泛的机器人竞赛之一,迄今为止已成功举办七届,主要分为省赛或区域赛以及全国总决赛两个阶段。四足机器人通过二次开发,让机器人具备环境感知能力,结合四足机器人的运动步态来展示“射门”、“顶球”、“抢球”、“点球”等挑战任务。本次大赛采用开源的ROS 绝影四足机器人平台,搭载可扩展的传感器,通过对运动部分和感知部分的二次开发,模拟未来生活的四足机器人应用和技术挑战。
四足机器人对抗赛是一场集技术创新、精密设计与实时应变于一体的激烈比赛。学院高度重视学生工程创新意识以及创新能力、实践能力培养。
比赛过程中,团队成员凭借对OpenCV、ROS等技术的深入研究与创新应用,克服了重重困难,最终获得了评审团的一致好评。自初赛起,参赛团队便面临巨大技术挑战。在准备区域预选赛的过程中,他们选择了OpenCV技术进行仪表盘和手势识别的开发任务,这一技术路线具有前沿性,但其难度亦是相当之大。
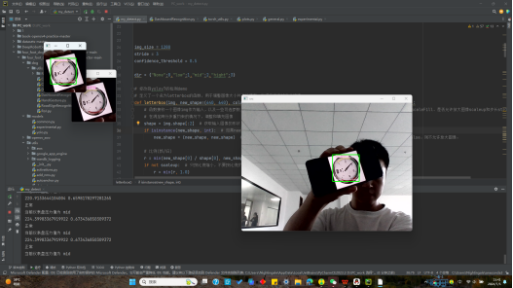
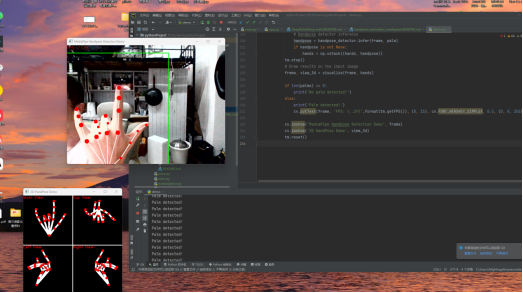
在应对复杂的图像处理算法以及实时性能的严格要求时,团队成员通过持续的试验与优化工作,最终实现了系统对各种手势和仪表的准确且迅速响应。
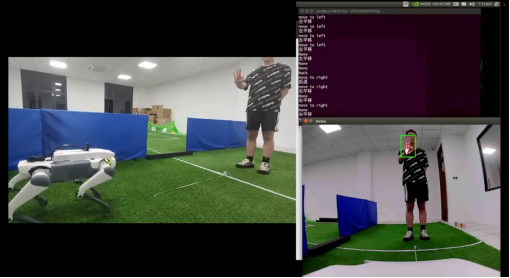
每一个调试成功的瞬间,均是对他们耐心与毅力的有力证明。在进入国赛后,挑战的难度进一步提升。团队需在四足机器人上实现自主导航功能,这涵盖了从三维建模到ROS系统的运用,以及深度相机信号与激光雷达信号的转换。
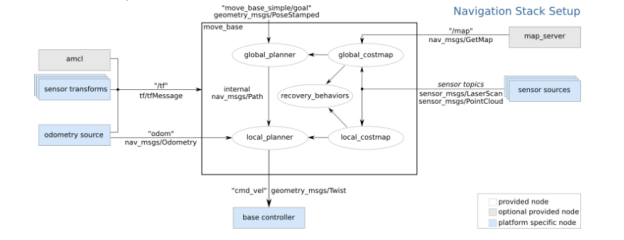
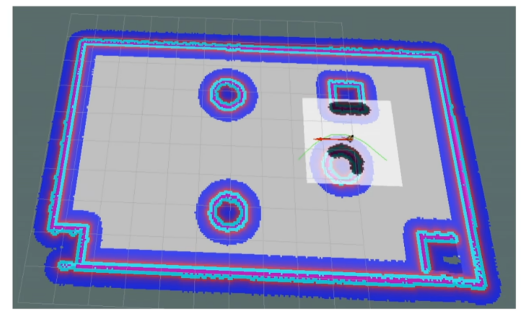
每一项技术实施均涉及复杂性及不确定性。特别是在构建栅格地图的过程中,团队成员必须应对庞大数据处理及精确环境重建的挑战。
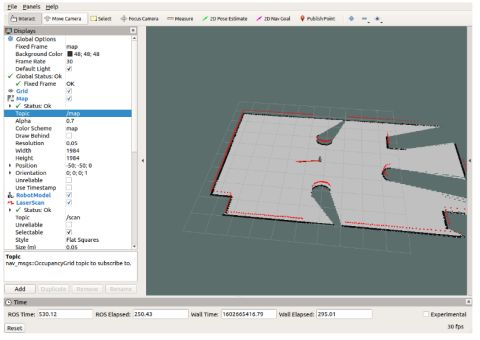
同学们借助虚拟环境预先进行测试,并逐步调整相关参数,以确保迁移到实体机器人上的方案既可行又稳定。
在将虚拟机技术迁移到实际四足机器人平台的过程中,团队面临了硬件兼容性问题以及软件调试方面的诸多挑战。

机器人之传感器集成与运动控制的调优,耗费了他们大量的时间与精力。

备赛期间,参赛师生每日均在实验室中进行长时间的测试与讨论,以确保所有组件能够精确地协同运作。尽管遭遇了诸多技术挑战,团队始终保持着高涨的热情和专注。他们坚信,每一次的失败都是通往成功的必经阶段。这种积极的心态和持续的努力,最终助同学们在竞赛中取得了卓越的成绩。通过这次竞赛,不仅证明了信息学子在智能机器人领域的专业素养,也向业界展示了青年科技人才的巨大潜能和创新精神。
此次获奖,对人工智能专业同学而言,是一个重要的里程碑,也是对他们辛勤研究和技术创新努力的肯定。展望未来,他们期望将此次竞赛中积累的经验和知识应用于更广泛的实践领域,为智能技术的发展贡献更大力量。

信息工程学院也将继续坚持“以赛促学、以赛促教”的教育理念,引导学生将学习、技能与科技前沿、产业关键领域的实际问题相结合,鼓励更多学生积极参与各类技能竞赛,不断提升自身的综合素质和实践能力,在实践中深化产学研深度融合模式,切实推进产学研深度融合,为创新创业技能人才培养提供坚实的支持和保障。
